欢迎您访问南京雪典照明有限公司网站,公司主营气动升降桅杆、电动天线升降杆、倒伏伸缩监控灯等产品!
全国咨询热线:13770775128
 行业动态
行业动态
无线电定位系统是指利用无线电波直线恒速传播特性通过测量固定或运动的物体的位置以进行定位的技术。无线电定位有雷达、无线电测向、无线电导航系统和全球定位系统等。
定义
无线电是指在自由空间(包括空气和真空)传播的电磁波,是其中的一个有限频带,上限频率在300GHz(吉赫兹),下限频率较不统一,在各种射频规范书,常见的有三3KHz~300GHz(ITU-国际电信联盟规定),9KHz~300GHz,10KHz~300GHz。
无线电定位系统是通过直接或间接测定无线电信号在已知位置的固定点(岸台)与船之间传播过程中的时间、相位差、振幅或频率的变化,确定距离、距离差、方位等定位参数,进而用位置线确定待定点位置(如船位)的测量技术利方法。
定位系统
所用定位系统,按确定距离或距离差等定位参数的原理,分为:①脉冲式无线电定位系统,是根据无线电信号传播时间与传播距离成正比原理,测量船台发射脉冲信号和岸台回答脉冲信号所经历时间间隔,求取距离或距离差;②相位式无线电定位系统,是根据无线电信号传播中的相位变化与传播距离成正比原理,通过测量两连续信号的相位差求取距离或距离差;③脉冲一相位式无线电定位系统。工作方式有多种,按位置线确定方式分为:双距离定位、双曲线定位、双方位定位、极坐标定位等。
雷达
雷达来自英文“无线电检测和测距”的略语RADAR,是利用电磁波探测目标并定位的设备。它对目标发射电磁波并接收其回波,由此获得目标到雷达的距离、径向速度、方位和高度等信息。利用雷达对地面或海上目标定位时,是测定目标相对于雷达的距离和方位>对空中目标进行定位时,须同时测定距离、方位和高度,这种雷达称为三坐标雷达,脉冲雷达测量目标距离时,实际是测发射脉冲间的时间差,因为电磁波以光速传播,据此可算出目标的距离;目标的方位利用雷达天线的锐方位波束测量,目标的仰角靠窄仰角波束测量;根据所测目标的仰角和距离。就可求得目标的高度。雷达定位在军亊上用于搜索和引导、跟踪测量和火力控制;民用方面可用于机场和海港管理、交通管制、气象预报及天文研究。
无线电导航
无线电导航是利用电磁波传播并结合运用天文、地理、海洋等有关知识,通过测定运动载体位置的有关参数以实现对船舶、飞机等运动载体的定位和导航。导航和定位是密切相关的,连续定位实质上就是导航。大多数无线电导航系统系协作式,即依靠导航台发射导航信号,使运动中的载体根据每个导航台方位以及星辰、地貌以准确判定所处的位置而进行工作。发射源大多设地面,也可装在卫星或飞机上。赋予无线电波以导航信息的方法很多,且均以利用无线电波的恒速、直线传播为基础。无线电导航技术的基本要素是测角和测距,因此可以组成测角-测角、测距-测距、测角-测距和测距差(双曲线)等系统。
(1)测角系统通过测定无线电波来向以确定运动载体与一条基准线(常用磁北基准线N)的夹角,实现定位。
(2)测距系统利用测量用户到地面导航台间的距离来实现导航定位。测距系统有转发、反射和测伪距三种方式。采用测伪距方式时,用户与导航台站都配备精密时钟,并按严格确定的时间辐射信号。用户收到信号后,根据自己的时钟确定传播时延r,从而得到伪距ρ=cr,式中c为光速。伪距ρ中含有用户与导航台站间的真实距离r,利用4个或4个以上时钟相互同步的台站,测出4个或4个以上的伪距,建立4个或4个以上的方程,解方程即得到用户的位置坐标。
(3)测距差系统是测量用户到两个地面台距离之差以进行,又称双曲线系统。测一条双曲线位置需要使用两个地面台,进一步的定位要用两条位置线的交叉点,需用三个以上地面台完成。多个地面台可组成台链。
(4)测速系统是测量运动体的航速,这种系统以多普勒效应为基础,按雷达方式工作,经过积分运算取得位置坐标,用于飞行器上。
(5)多参量系统利用电磁辐射中几个参量和几何参量的关系进行导航定位。其中罗兰C。系统是既利用脉冲测距差方式取得粗测数据,消除多值性,又利用连续波测相位差取得精测数据。罗兰D导航系统和脉冲一8是其派生系统。塔康导航系统也是一种多参量导航系统,它本身是询问应答式测距系统,又在辐射的脉冲信号上进行调幅,产生调制包络,用包络相位测定用户相对于地面台的方位。塔康导航系统用求直线位置线与圆位置线交点进行定位。
为了单值地确定运动载体的位置,必须找出运动载体相对于导航台的两条或两条以上的位置线,两条位置线的交点就是运动载体的位置。所谓位置线,就是对运动载体测定的某个几何参量(如夹角、距离、距离差等)具有同样数值的点的轨迹。最常见的位置线有直线、圆和双曲线等。如图所示。
直线位置线,即等方位线,它与通过导航台或运动载体的参考方向保持不变,对于导航台A,运动载体M的方位为aM,对于运动载体M,导航台的方位为aA,AM就是一条等方位的直线位置线,如图1(a)所示。
与导航台保持恒定距离的位置线是一个以导航台为中心的圆位置线,如图1(B)所示,R为常数。从运动载体M测量到两个导航台A、B的距离差Rd,Rd保持
A、B导航台M运动载体
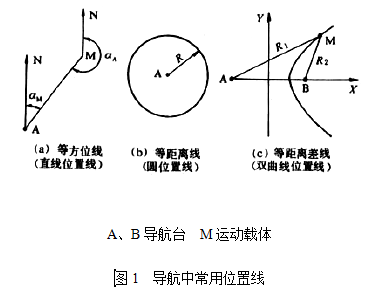
恒值的等距离差线是一条双曲线位置线,如图1(c)所示。
等方位位置线与等距离位置线相交的定位法称为ρ―Θ定位法(如塔康导航系统)。等距离位置线与等距离位置线相交的定位法称为ρ-ρ定位法。双曲线位置线与双曲线位置线相交的定位法称为双曲线定位法(如台卡、罗兰c和奥米加等导航系统)。
全球定位系统(GPS)
美国和苏联先后发展了类似的系统。全称为“导航星”授时和测距全球定位系统。它可以实时和全天候地为全球范围从地面到9000km高空的任一物体提供高精度的三维位置、三维速度和时间信息。GPS系统由空间(卫星)、地面监控和用户接收机三大部分组成。空间部分有18颗(或21颗)高度为2万公里的导航卫星,运转在6个倾角为55°的圆轨道平面上,每面相隔60°,轨道周期为12h,保证在地球上任一地点任一时刻均能看到4颗以上仰角大于5°的卫星,每颗导航星上均载有稳定度为10-13/日的原子钟,这是GPS之所以能精确定位、授时的基础。每个卫星以L频段的两个频率连续发送导航信号,并采用扩频技术来提高抗干扰能力。这两个信号分别称为粗测码(C/A码)和精测码(P码)。前者可供民用,定位25m以内;后者专供军用,定位精度在1~10m内。两种信号均含有可向用户接收机提供所需的卫星情况、系统时间、接收机正在跟踪的卫星的星历(目前和将来的位置)等信息。
控制部分由一个主控站和分布的五个监控站组成,各监控站测出卫星位置、速度和时间数据以及各站的大气参数,送往主控站,后者经数据处理后得到各星的星历、星钟偏差和电离层延时等数据,然后每隔12h注入卫星一次,更新星上的数据。
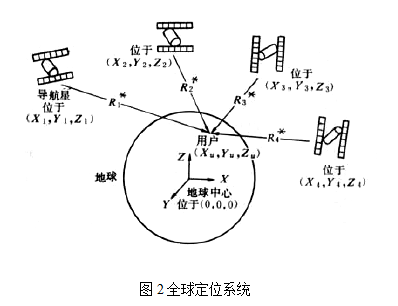
全球定位系统如图2所示。用户接收机能同时从4颗卫星接收到由星钟驱动的测距码,测出由星到接收机的延时т1,т2,т3,т4,然后算出用户到每颗星的伪距 。
。
 ,i=1,2,3,4
,i=1,2,3,4
伪距与卫星和用户坐标及时钟差的关系为

式中c为光速;△tu为用户时钟误差、xiYiZi是第i颗卫星的坐标,由导航信息提供。据此可求解×u、Yu、Zu和△tu(×uYuZu),是以地心为原点的用户直角坐标,可再转换成常用的经纬度和高度。
GPS系统除广泛用于军事方面外,在航空、航海、勘探、测绘、地球物理及旅游等方面也有应用。





