欢迎您访问南京雪典照明有限公司网站,公司主营气动升降桅杆、电动天线升降杆、倒伏伸缩监控灯等产品!
全国咨询热线:13770775128
 行业动态
行业动态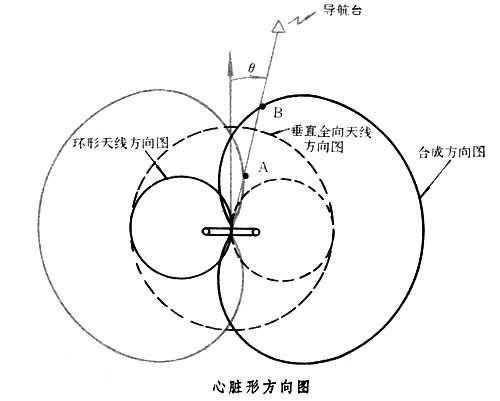
系统工作原理
无线电导航所使用的设备或系统有无线电罗盘、伏尔导航系统、塔康导航系统、罗兰C导航系统、奥米加导航系统、多普勒导航系统、卫星导航系统以及发展中的“导航星”全球定位系统等。
无线电信号中包含4个电气参数:振幅、频率、时间和相位。无线电波在传播过程中,某一参数可能发生与某导航参量有关的变化。通过测量这一电气参数就可得到相应的导航参量。根据所测电气参数的不同,无线电导航系统可分为振幅式、频率式、时间式(脉冲式)和相位式 4种。也可根据要测定的导航参量将无线电导航系统分为测角(方位角或高低角)、测距、测距差和测速 4种。现代还根据无线电导航设备的主要安装基地分为地基(设备主要安装在地面或海面)、空基(设备主要安装在飞行的飞机上)和卫星基(设备主要装在导航卫星上) 3种。根据作用距离分为近程、远程、超远程和全球定位4种。
无线电导航测角系统
利用无线电波直线传播的特性,将飞机上的环形方向性天线转到使接收的信号幅值为最小的位置,从而测出电台航向(见无线电罗盘),这属于振幅式导航系统。同样,也可利用地面导航台发射迅速旋转的方向图,根据飞机不同位置接收到的无线电信号的不同相位来判定地面导航台相对飞机的方位角(见伏尔导航系统),这属于相位式导航系统。测角系统可用于飞机返航(保持某导航参量不变,例如保持电台航向为零,引导飞机飞向导航台)。几何参数(角度、距离等)相等点的轨迹称为位置线。测角系统的位置线是直线(角度参量保持恒值的飞机所在锥面与地平面的交线)。测出两个电台的航向就可得到两条直线位置线的交点,这交点就是飞机的位置。
无线电导航测距系统
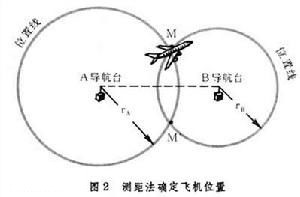
利用无线电波恒速直线传播的特性。在飞机和地面导航台上各安装一套接收、发射机。飞机向地面导航台发射询问信号,地面导航台接收并向飞机转发回答信号。飞机接收机收到的回答信号比询问信号滞后一定时间。测出滞后时间就可算出飞机与导航台的距离。利用电波的反射特性,测定由地面导航台或飞机的反射信号的滞后时间也可求出距离。无线电导航测距系统的位置线是一个圆周,它由地面导航台等距的圆球位置面与飞机所在高度的地心球面相交而成。利用测距系统可引导飞机在航空港作等待飞行,或由两条圆位置线的交点确定飞机的位置(图2)。定位的双值性(有两个交点)可用第三条圆位置线来消除。测距系统可以是脉冲式的、相位式的或频率式的。

无线电导航测距差系统
在飞机上安装一台接收机,地面设置2~4个导航台。各导航台同步地(时间同步或相位同步)发射无线电信号,各信号到达飞机接收机的时间滞后与导航台到飞机的距离成比例。测出它们到达的时间差就可求得距离差。与两个定点保持等距离差的点的轨迹是球面双曲面,因此这种系统的位置线是球面双曲面与飞机所在高度的地心球面相交而成的双曲线。利用3或4个地面导航台可求得两条双曲线。根据两条双曲线的交点即可定出飞机的位置(图3)。定位的双值可用第三条双曲线来消除。现代使用的测距差系统大多是脉冲式或相位式的。
无线电导航测速系统
这种系统大多是利用多普勒效应工作的。安装在飞机上的多普勒导航雷达以窄波束向地面发射厘米波段的无线电信号。由于存在多普勒效应,飞机接收到由地面反射回来的信号频率与发射信号频率不同,存在一个多普勒频移,测出多普勒频移就可求出飞行器相对于地面的速度(见多普勒导航系统)。再利用飞机上垂直基准和航向基准给出的俯仰角和航向角,将径向速度分解出东向速度和北向速度,分别对时间求积分即可得出飞机当时的位置。多普勒测速系统的位置线也是双曲线,它是由等多普勒频移的锥面与飞机所在高度的地心球面相交而成的。多普勒导航测速系统属于频率式(见飞机导航系统)。

我国无线电导航系统
我国目前正在使用的主要有两类。一类叫无方向信标,也叫中波导航台,英文缩写为NDB;另一类是甚高频全向信标(缩写为VOR)和测距仪(缩写为DME)组成的系统。
在中波导航台系统中,飞机使用可以转动的环状天线接收信号,当测到电波最强的方向时,天线停止转动,于是就测出电台与飞机之间的方位。飞机按这个方向飞行,就能准确地飞到电台所在的位置。中波导航台准确性低并且容易受到天气的影响,但它价格便宜,设备结实耐用,所以世界上很多中小型机场和发展中国家的多数机场还在使用它。我国广大的西部地区的机场也在使用这种系统。
甚高频全向信标台使用甚高频电波,直线传播,不受天气影响,准确度高。VOR的天线在发射时不停地转动, 发射出的信号按方向改变而改变。飞机收到VOR信号时,机上的仪表按照信号的频率和强度变化自动指示出正北方向和飞机相对于发射台的方向。VOR的作用有效范围在200千米以内。通常在航路上每隔150千米左右建立一个VOR台。飞机根据航空地图上标出的VOR台的位置, 就可以在航路上顺利地飞行了。在使用VOR航路飞行时,驾驶员只能知道发射台的方向,但不能确定飞机与发射台之间的距离。当测距仪系统与VOR配套使用后,这个问题就解决了。DME的地面发射台和VOR台建在同一地点或建在机场附近。它所使用的频率是超高频,频率在1000兆赫左右。这套系统由飞机上的询问机和地面台站上的应答机构成。飞机上的询问机向地面发出一对脉冲信号,这脉冲之间的间隔是随机的,使不同飞机发出的信号都是不同的。地面应答机接受到这对脉冲信号后发回同样的一对脉冲信号。把发出信号和收到返回信号所消耗的时间与无线电波传播的速度相乘,就可以算出飞机与地面站之间的距离。测距仪可以测量出的距离最远可达500千米,误差仅为200米左右。在天空中飞行的各架飞机在询问时所发出的脉冲对的间隔不同,在接收时只接收自己所发出的脉冲信号。同时有几架飞机向地面站询问时,它们的信号彼此不会混淆。VOR--DME系统的无线电波在天空中划出一条明确的通道,这条空中通道就叫航路。飞机在航路上飞行,随时可以从仪表上得知自己的航向和位置,根据地面管制员的调度,一个接一个地按航路点飞行,一直飞完全程。VOR--DME导航系统保证了飞机能安全有秩序地飞行,极大地提高了空中的交通流量和飞行安全。现在这个系统成为世界上大部分地区主要的导航手段。
建设VoR—DME的航路,费用很高。不可能把地面上所有台站之间都建立起航路。一般只能在中心城市之间或中心城市到一般城市之间设立航路。果飞机在两个没有航路的一般城市之间飞行,为了保证飞行安全,这时飞机不得不采取从一个城市沿着已有的航路飞到中心城市,再沿另一条航路飞往所要去的一般城市。这样飞行不但浪费了燃油和时间,又使航路变得拥挤。在飞机上应用了电子计算机以后,才解决了这个问题。从两个以上的VOR地面台站收到的信号经过飞机上的电子计算机处理后得出一条实际上没有地面台站的航线,在这条航线上设置出假想的航路点,飞机按照这条航线飞行,同样也可顺利抵达目的地。这种专门设计的计算机被称为航线计算机。飞机上配备了这种计算机后,就可以在能收到两个以上VOR地面台站所发出的信号的地方,按照计算机计算出来的航线飞行,这种方法叫区域导航。它把VOR的导航范围由几条航路扩展为一个平面,这个平面就是各个VOR导航台站无线电信号所能覆盖的整个平面。
VOR--DME系统使用的甚高频和超高频电波是直线传播的,作用距离在200千米之内。在浩瀚的大洋或大面积的无人区中,是无法建造出联接一条航路的诸多VOR站的。为了满足远距离导航的需要,又开发出罗兰系统和欧米加系统。这两种系统使用了低频和甚低频的无线电波,作用距离都在2500千米以上。在地球表面只要建立起不多的这类台站,就可以为飞机飞越大洋或辽阔的无人区导航。这种导航的缺点是精确度不够高,而且需要功率非常强大的发射台。20世纪60年代以后,有关专业人士们又开始寻找更好的方式以取代无线电导航系统。

北斗导航系统
北斗卫星导航系统正式进入国际海事组织全球无线电导航系统。
11月17日至21日,国际海事组织海上安全委员会第94次会议在英国伦敦召开,交通运输部组团参会,并代表中国政府向国际海事组织承诺我国北斗卫星导航系统的服务性能和运行维护管理要求,以及北斗卫星导航系统在国际海事领域的应用政策,表达了我国政府的责任与态度。
交通运输部有关负责人指出,我国作为国际海事组织A类理事国,此次国际海事组织对北斗卫星导航系统的认可,将带动北斗卫星导航系统在航海领域的国际化、产业化。北斗卫星导航系统也正式成为全球无线电导航系统的组成部分,取得面向海事应用的国际合法地位。这也是我国北斗卫星导航系统标准首次获得国际组织的系统认可。
此次国际海事组织认可后,我国将继续全面推进国际电工委员会、国际航标组织、国际海事无线电技术委员会、国际电信联盟等国际技术组织的标准、规范、指南文件的制定和修订,以实现北斗系统进一步在国际海事领域的全方位应用。






